百度搜索的优势网站优化平台
目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
5.算法完整程序工程
1.算法运行效果图预览


2.算法运行软件版本
MATLAB2022A
3.部分核心程序
.......................................................................
% 训练Faster R-CNN目标检测器
[detector, info] = trainFasterRCNNObjectDetector(trainingData,lgraph,options,'NegativeOverlapRange',[0 0.3],'PositiveOverlapRange',[0.6 1]);
% 在测试集上进行检测
figure;
for i = 1:12isubplot(3,4,i); I = imread(test_Tbl0.imageFilename{i});I = imresize(I,In_layer_Size(1:2));[bboxes,scores] = detect(detector,I);if isempty(bboxes)==0I1 = insertObjectAnnotation(I,'rectangle',bboxes,scores);elseI1 = I;endimshow(I1)
end
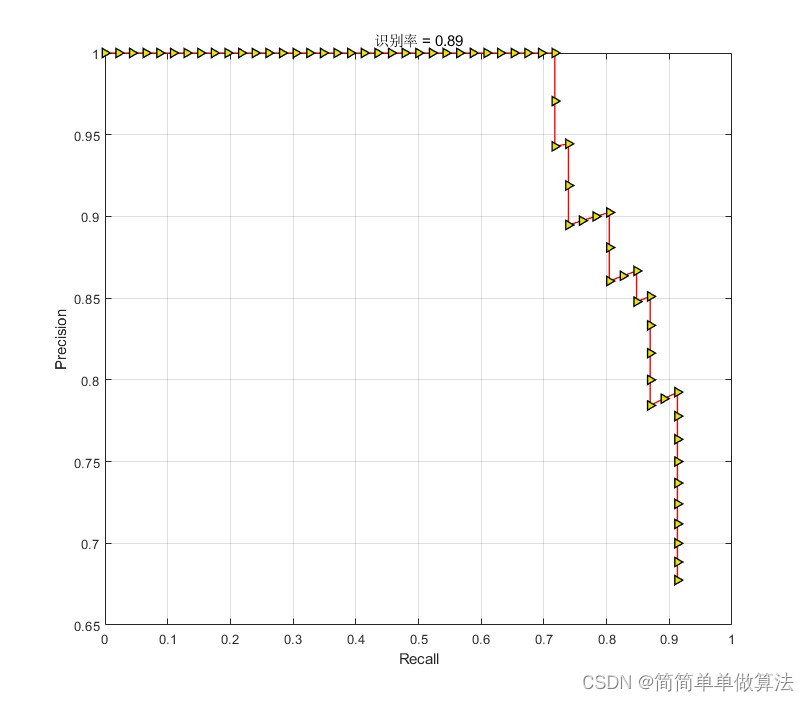
% 绘制精度-召回曲线并显示AP值
figure
plot(recall,precision,'-r>',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.9,0.0]);
xlabel('Recall')
ylabel('Precision')
grid on
title(sprintf('识别率 = %.2f', ap))
00334.算法理论概述
车辆检测是计算机视觉和人工智能领域的重要研究方向,它在交通管理、智能驾驶和安防等领域具有广泛的应用。Faster R-CNN是一种常用的目标检测算法,结合了深度学习和区域建议技术,能够高效地检测出图像中的车辆目标。
1、数学原理:
Faster R-CNN是一种基于深度学习的目标检测算法,由Ross Girshick等人在2015年提出。它的核心思想是引入区域建议网络(Region Proposal Network,RPN)来生成候选区域,并结合Fast R-CNN来进行目标分类和边界框回归。通过端到端的训练,Faster R-CNN能够在一张图像中高效地检测出多个不同类别的目标。
RPN网络:
RPN是Faster R-CNN的核心组件之一,用于生成候选区域(Region Proposal)。RPN通过滑动窗口在特征图上提取多个不同尺度的锚框(Anchor),对每个锚框进行分类和回归预测。其中,分类预测用于判断锚框是否含有目标,回归预测用于修正锚框的位置,使其更准确地覆盖目标。RPN的数学原理可以描述为:
输入:特征图F,其中每个像素点对应于原始图像的一个区域。
输出:每个锚框的分类得分(是否含有目标)和位置调整量。
具体来说,对于每个锚框i,RPN将特征图F中的对应区域作为输入,通过两个全连接层(一个用于分类,一个用于回归)得到分类得分p_i和位置调整量t_i:
p_i = P_cls(F_i)
t_i = P_reg(F_i)
其中,P_cls和P_reg分别是分类和回归的全连接层,F_i是特征图中对应锚框i的区域。
Fast R-CNN分类和回归:
在RPN生成的候选区域基础上,Faster R-CNN引入Fast R-CNN网络来进行目标的最终分类和边界框回归。
Fast R-CNN的数学原理与Faster R-CNN之前的版本相同,可以表示为:
输入:候选区域R_i,对应于原始图像的一个目标区域。
输出:目标类别的分类概率p_i和边界框回归的位置调整量t_i。
具体来说,Fast R-CNN将候选区域R_i作为输入,通过多个卷积和全连接层提取特征,并在最后的全连接层上得到分类概率p_i和位置调整量t_i:
p_i = P_cls(R_i)
t_i = P_reg(R_i)
其中,P_cls和P_reg分别是分类和回归的全连接层。
2、实现过程:
基于Faster R-CNN深度学习网络的车辆检测算法的实现过程主要包括以下几个步骤:数据准备、网络构建、训练和测试。下面将详细介绍每个步骤:
数据准备:
首先,需要准备车辆检测的训练数据和测试数据。训练数据包括带有标签的图像样本,标签中包含每个目标的类别和边界框信息。测试数据是用于评估算法性能的图像样本,不需要标签信息。
网络构建:
构建Faster R-CNN网络,包括RPN网络和Fast R-CNN网络。在MATLAB中,可以使用Deep Learning Toolbox提供的函数来构建网络,例如imageInputLayer、convolution2dLayer、fullyConnectedLayer等。
在构建RPN网络时,通常采用VGG16或ResNet等预训练的卷积神经网络作为特征提取器,然后在其基础上添加RPN层和全连接层。
训练:
使用准备好的训练数据对Faster R-CNN网络进行训练。在训练过程中,通过计算分类损失和回归损失来更新网络参数,使得网络能够准确地检测出车辆目标。
可以使用MATLAB的trainFasterRCNNObjectDetector函数来进行训练,该函数将训练图像、标签和网络结构作为输入,同时可以设置训练参数,例如学习率、迭代次数等。
测试:
使用准备好的测试数据对训练好的Faster R-CNN网络进行测试。通过将测试图像输入到网络中,获取每个目标的类别和边界框信息。然后可以将检测结果与真实标签进行比较,评估算法的性能。MATLAB中可以使用detect函数对图像进行目标检测,输出每个目标的边界框和得分。
5.算法完整程序工程
OOOOO
OOO
O